Το Roadrunner αποτελεί την πιο πρόσφατη, εντυπωσιακή απόδειξη ότι η βιομηχανία της ρομποτικής βρίσκεται στα πρόθυρα μιας νέας, τεράστιας σχεδιαστικής ανατροπής. Όταν το ινστιτούτο Robotics and AI (RAI) παρουσιάζει μια νέα τεχνολογία, ολόκληρος ο τεχνολογικός κόσμος οφείλει να παρακολουθεί με απόλυτη προσοχή. Η συγκεκριμένη εταιρεία δεν αποτελεί έναν τυχαίο παίκτη στον χώρο της καινοτομίας. Ιδρύθηκε από τον Marc Raibert, τον άνθρωπο που ουσιαστικά διαμόρφωσε τη σύγχρονη ιστορία των αυτόνομων μηχανών, έχοντας προηγουμένως ιδρύσει την πρωτοπόρο Boston Dynamics. Είναι ο ίδιος οραματιστής μηχανικός που βρίσκεται πίσω από τη δημιουργία του εκπληκτικού ανθρωποειδούς Atlas και του εμβληματικού, τετράποδου ρομπότ Spot. Τώρα, με έδρα τη Μασαχουσέτη, η νέα του ερευνητική ομάδα μόλις τράβηξε το κάλυμμα από ένα εντελώς νέο, αινιγματικό prototype, το οποίο φιλοδοξεί να επαναπροσδιορίσει τον τρόπο με τον οποίο οι μηχανές κινούνται στον φυσικό χώρο.
Η κληρονομιά του ιδρυτή και το νέο όραμα
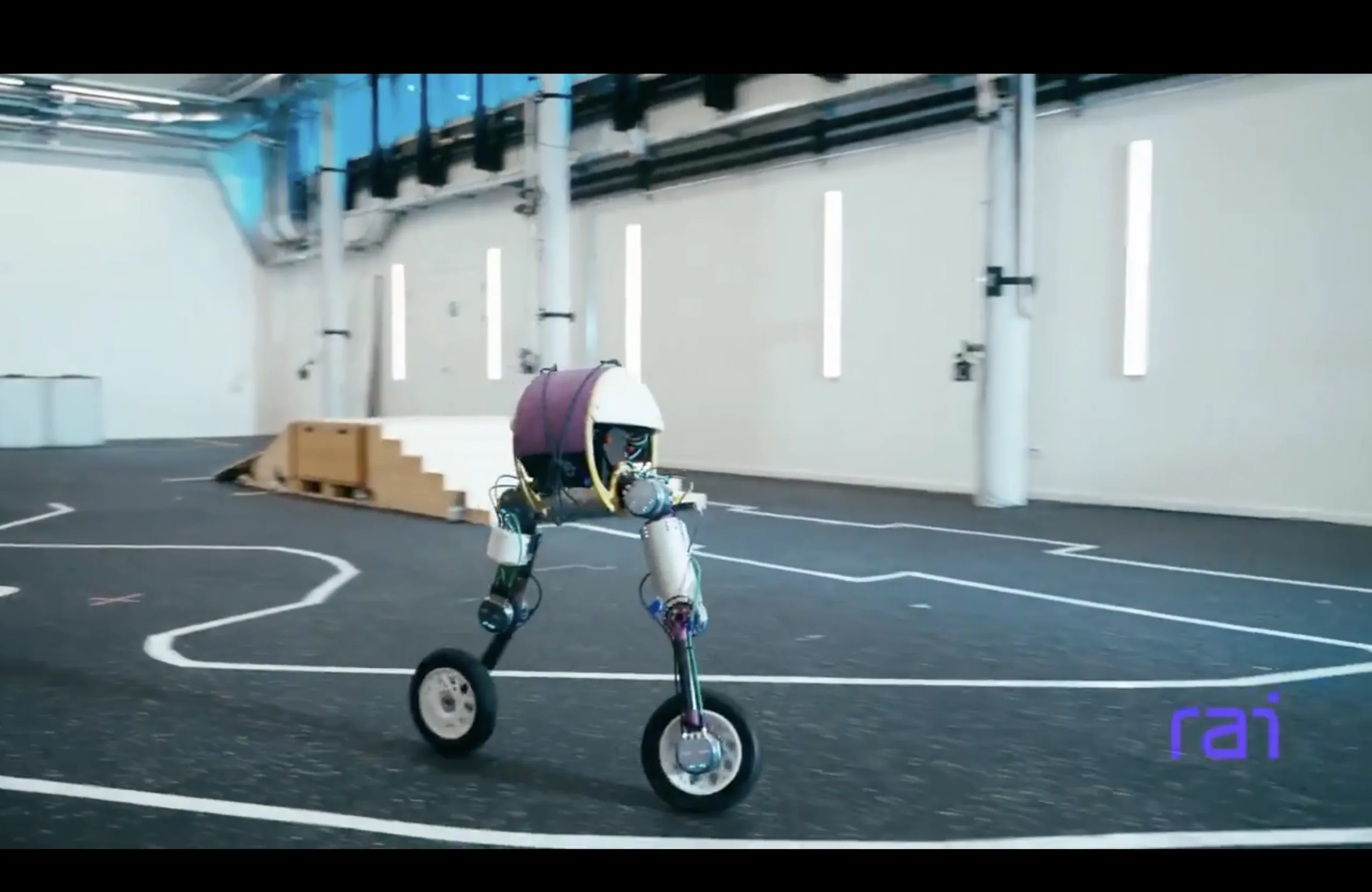
Meet “Roadrunner,” a new 15kg (33 lb) bipedal wheeled robot prototype featuring multi-modal locomotion: side-by-side and inline wheel modes and and stepping. Its symmetric legs articulate at the knee for obstacle avoidance. pic.twitter.com/rcMW3DAEv3
— RAI Institute (@rai_inst) March 23, 2026
Η ίδρυση του RAI Institute το 2022 δεν ήταν μια απλή επιχειρηματική κίνηση, αλλά μια βαθιά στρατηγική απόφαση για τη γεφύρωση δύο κόσμων. Ο στόχος ήταν να προωθηθεί η απόλυτη, απρόσκοπτη ενσωμάτωση της πλέον προηγμένης τεχνητής νοημοσύνης με τα κορυφαία μηχανικά συστήματα ρομποτικής. Χτίζοντας πάνω στην αδιαμφισβήτητη τεχνογνωσία που συνδέεται άμεσα με τους πρωτοπόρους της βιομηχανίας, το ινστιτούτο έχει ήδη γίνει ευρέως γνωστό για την ανάπτυξη εξαιρετικά δυναμικών και ευέλικτων μηχανών, ικανών να εκτελούν μια εντυπωσιακή σειρά από πολύπλοκες, σχεδόν οργανικές κινήσεις. Το νέο τους δημιούργημα ενσαρκώνει πλήρως αυτή την επιθετική, καινοτόμο φιλοσοφία, αφήνοντας πίσω τα παραδοσιακά, δυσκίνητα σχέδια του παρελθόντος.
Υβριδική κινητικότητα και μηχανικός σχεδιασμός
Αντί να ακολουθήσει την πεπατημένη οδό των κλασικών humanoids που προσπαθούν να μιμηθούν αδέξια το ανθρώπινο περπάτημα, η ομάδα μηχανικών επέλεξε μια ριζοσπαστική, υβριδική προσέγγιση. Πρόκειται για ένα ελαφρύ, δίποδο ρομπότ με τροχούς (bipedal-wheeled robot), το οποίο ζυγίζει μόλις 15 κιλά. Αυτός ο ιντριγκαδόρικος, αντισυμβατικός σχεδιασμός προσφέρει μια αξιοσημείωτη, σχεδόν πρωτοφανή ευελιξία στον χώρο. Το μυστικό κρύβεται στα συμμετρικά του πόδια, τα οποία διαθέτουν πλήρως αρθρωτά γόνατα (knee-jointed legs). Αυτή η ανατομία του επιτρέπει να κινείται με την ταχύτητα και την ενεργειακή απόδοση ενός τροχοφόρου οχήματος στις ευθείες, ενώ ταυτόχρονα διατηρεί την ικανότητα να ανασηκώνεται, να λυγίζει και να αποφεύγει απρόβλεπτα εμπόδια με χαρακτηριστική ευκολία.
Ακροβατικές επιδόσεις και πλοήγηση στον χώρο
Η ευκολία των κινήσεών του είναι ικανή να αφήσει άφωνο ακόμα και τον πιο απαιτητικό παρατηρητή της τεχνολογίας. Η συμπεριφορά του στον φυσικό χώρο δεν θυμίζει σε τίποτα μια ψυχρή, προγραμματισμένη μηχανή. Ξεκινώντας από μια εντελώς αδρανή θέση ηρεμίας στο έδαφος, η μηχανή εκτινάσσεται ακαριαία σε όρθια στάση και αρχίζει να κυλάει με απόλυτη ομαλότητα στο επίπεδο έδαφος. Εκεί όμως που η μηχανική ευφυΐα του hardware πραγματικά λάμπει, είναι όταν το ρομπότ έρχεται αντιμέτωπο με πολύπλοκες, ανισόπεδες αρχιτεκτονικές δομές.
Όταν συναντά μια σειρά από σκαλοπάτια, δεν σταματά. Αντιθέτως, χρησιμοποιεί τους κινητήριους τροχούς του κυριολεκτικά ως πέλματα, πατώντας σταθερά και ανεβαίνοντας μέχρι την κορυφή της σκάλας. Αμέσως μετά, κατεβαίνει ομαλά μια απότομη ράμπα, επιδεικνύοντας απόλυτο έλεγχο του κέντρου βάρους του. Το πιο εντυπωσιακό ίσως στοιχείο της κινηματικής του ρουτίνας, είναι η στιγμή που προσεγγίζει ξανά το εμπόδιο των σκαλοπατιών, αυτή τη φορά με την όπισθεν. Κατεβαίνει τα σκαλιά προς τα πίσω, επιδεικνύοντας μια εντυπωσιακή ισορροπία που θυμίζει έντονα τις επικίνδυνες, ελεγχόμενες φιγούρες ενός επαγγελματία ακροβάτη.
Η δύναμη του λογισμικού και η εκπαίδευση zero-shot
Όλη αυτή η εντυπωσιακή φυσική παρουσία δεν θα ήταν εφικτή χωρίς μια εξίσου επαναστατική προσέγγιση στο κομμάτι του λογισμικού ελέγχου. Όπως εξηγούν οι επικεφαλής του έργου, το ρομπότ δεν ελέγχεται από ένα κατακερματισμένο σύνολο μεμονωμένων εντολών. Αντιθέτως, μια και μόνο ενιαία πολιτική ελέγχου (single control policy) εκπαιδεύτηκε εντατικά για να χειρίζεται ταυτόχρονα τόσο την παράλληλη οδήγηση (side-by-side) όσο και την in-line οδήγηση, όπου οι τροχοί ευθυγραμμίζονται ο ένας πίσω από τον άλλον.
Το πραγματικό, όμως, τεχνολογικό επίτευγμα κρύβεται στη διαδικασία ανάπτυξης αυτών των αλγορίθμων. Πολλές από τις πιο σύνθετες συμπεριφορές του – συμπεριλαμβανομένης της ικανότητάς του να στέκεται όρθιο από διάφορες, περίπλοκες διαμορφώσεις του εδάφους και να ισορροπεί με απόλυτη ακρίβεια πάνω σε έναν μόνο τροχό – αναπτύχθηκαν επιτυχώς μέσω εκπαίδευσης zero-shot απευθείας πάνω στο τελικό hardware. Αυτό με απλά λόγια σημαίνει ότι η τεχνητή νοημοσύνη εκπαιδεύτηκε σε εικονικά περιβάλλοντα προσομοίωσης και στη συνέχεια το λογισμικό φορτώθηκε στη φυσική μηχανή. Η τελευταία κατάφερε να εκτελέσει τις πολύπλοκες ενέργειες άψογα με την πρώτη προσπάθεια, χωρίς να απαιτηθεί απολύτως καμία επιπλέον φυσική εκπαίδευση, ρύθμιση ή μικροδιόρθωση στο εργαστήριο.
Το μέλλον των βιομηχανικών εφαρμογών
Η διοίκηση του RAI Institute σκοπεύει να χρησιμοποιήσει αυτό το πρωτοποριακό τροχοφόρο σύστημα ως μια βασική ερευνητική πλατφόρμα, προκειμένου να ωθήσει τα όρια της ευέλικτης, δυναμικής κινητικότητας (agile mobility) σε εντελώς νέα, ανεξερεύνητα επίπεδα. Κοιτάζοντας προς το μέλλον, δεν είναι καθόλου δύσκολο να φανταστεί κανείς μια ελαφρώς πιο εξελιγμένη, εμπορική έκδοση αυτού του ρομπότ να αναπτύσσεται μαζικά σε πραγματικές συνθήκες εργασίας.
Οι εφαρμογές είναι ατελείωτες. Από επικίνδυνες βιομηχανικές επιθεωρήσεις σε απρόσιτα περιβάλλοντα και εργοτάξια, μέχρι βαριές, επαναλαμβανόμενες εργασίες εφοδιαστικής αλυσίδας μέσα σε αχανείς αποθήκες (warehouses). Σε πολλές από αυτές τις συγκεκριμένες, βιομηχανικές καταστάσεις, η υβριδική φύση του – που συνδυάζει την ταχύτητα του τροχού με την ευελιξία του ποδιού – μπορεί να αποτελέσει μια πολύ πιο βιώσιμη, ενεργειακά αποδοτική και αξιόπιστη εναλλακτική λύση σε σχέση με τα εξαιρετικά πολύπλοκα, ακριβά και συχνά αργά ανθρωποειδή ρομπότ που στηρίζονται αποκλειστικά σε μηχανικά πόδια.





